机械设计专业测试(机械设计基础试题及答案)
1.机械设计基础试题及答案
机械设计基础试题及答案一、填空1.凸轮主要由凸轮,推杆和机架三个基本构件组成。
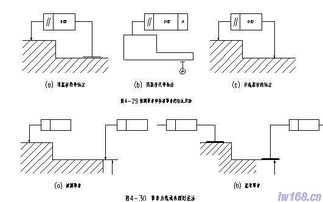
2.凸轮机构从动件的形式有 尖顶_从动件,滚子 从动件和平底_从动件。(见教材P52页)。
3.按凸轮的形状可分为_盘形凸轮、移动凸轮_圆柱_凸轮和曲面_凸轮。(教材P51页)。
4.常用的间歇运动机构有_棘轮机构,槽轮机构,凸轮式间歇机构和不完全齿机构等几种。(见教材P62~66页)5.螺纹的旋向有左旋和右旋,牙形有三角形,矩形,梯形,和锯齿形。
(教材P67页)6.标准外啮合斜齿轮传动的正确啮合条件是:两齿轮的_法面_模数和_法面压力角_都相等,齿轮的_螺旋角相等_角相等、旋向_相反。二、选择1.取分离体画受力图时, C、E、F 力的指向可以假定, A、B、D、G 力的指向不能假定。
(教材P6~P13)A.光滑面约束力 B.柔体约束力 C.铰链约束力 D.活动铰链反力 E.固定端约束力 F.固定端约束力偶矩 G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在 B 的方向上,使投影方程简便;矩心应选在 F、G点上,使力矩方程简便。(教材P19~P24)A.与已知力垂直 B.与未知力垂直 C.与未知力平行 D.任意E.已知力作用点 F.未知力作用点 G.两未知力交点 H.任意点3.对于铰链四杆机构,当满足杆长之和的条件时,若取 C 为机架,将得到双曲柄机构。
(见教材P40~P41)A.最长杆 B.与最短杆相邻的构件C.最短杆 D.与最短杆相对的构件4.凸轮机构从动杆的运动规律,是由凸轮的( D)所决定的。A.压力角 B.滚子C.形状 D.轮廓曲线5.对于铰链四杆机构,当满足杆长之和的条件时,若取(B )为机架,一定会得到曲柄摇杆机构。
A.最长杆B.与最短杆相邻的构件 C.最短杆 D.与最短杆相对的构件6.为保证平面四杆机构良好的传力性能,( B)不应小于最小许用值。A.压力角 B.传动角 C.极位夹角 D.啮合角7.力F使物体绕点O转动的效果,取决于(C )。
A.力F的大小和力F使物体绕O点转动的方向 B.力臂d的长短和力F使物体绕O点转动的方向 C.力与力臂乘积F?d的大小和力F使物体绕O点转动的方向 D.力与力臂乘积Fd的大小,与转动方向无关。8.凸轮机构中的压力角是指( B) 间的夹角。
A.凸轮上接触点的法线与该点的线速度方向 B.凸轮上的接触点的法线与从动件的运动方向 C.凸轮上的接触点的切线与从动件的运动方向9.平面四杆机构无急回特性时,行程速比系数(C )。A.大于1 B.小于1 C.等于110.机器与机构的区别在于(C )。
A. 是否由各种零件经装配而成的组合体 B.它们各部分之间是否有确定的相对运动 C. 在工作时是否能完成有效的机械功或能量转化。
2.求机械设计基础的试题及答案,要一些典型的考试容易考的
机械设计基础试题及答案
一、填空
1.凸轮主要由凸轮,推杆和机架三个基本构件组成。
2.凸轮机构从动件的形式有 尖顶_从动件,滚子 从动件和平底_从动件。(见教材P52页)。
3.按凸轮的形状可分为_盘形凸轮、移动凸轮_圆柱_凸轮和曲面_凸轮。(教材P51页)。
4.常用的间歇运动机构有_棘轮机构,槽轮机构,凸轮式间歇机构和不完全齿机构等几种。(见教材P62~66页)
5.螺纹的旋向有左旋和右旋,牙形有三角形,矩形,梯形,和锯齿形。(教材P67页)
6.标准外啮合斜齿轮传动的正确啮合条件是:两齿轮的_法面_模数和_法面压力角_都相等,齿轮的_螺旋角相等_角相等、旋向_相反。
二、选择
1.取分离体画受力图时, C、E、F 力的指向可以假定, A、B、D、G 力的指向不能假定。(教材P6~P13)
A.光滑面约束力 B.柔体约束力 C.铰链约束力 D.活动铰链反力 E.固定端约束力 F.固定端约束力偶矩 G.正压力
2.列平衡方程求解平面任意力系时,坐标轴选在 B 的方向上,使投影方程简便;矩心应选在 F、G点上,使力矩方程简便。(教材P19~P24)
A.与已知力垂直 B.与未知力垂直 C.与未知力平行 D.任意
E.已知力作用点 F.未知力作用点 G.两未知力交点 H.任意点
3.对于铰链四杆机构,当满足杆长之和的条件时,若取 C 为机架,将得到双曲柄机构。(见教材P40~P41)
A.最长杆 B.与最短杆相邻的构件
C.最短杆 D.与最短杆相对的构件
4.凸轮机构从动杆的运动规律,是由凸轮的( D)所决定的。
A.压力角 B.滚子
C.形状 D.轮廓曲线
5.对于铰链四杆机构,当满足杆长之和的条件时,若取(B )为机架,一定会得到曲柄摇杆机构。
A.最长杆B.与最短杆相邻的构件 C.最短杆 D.与最短杆相对的构件
6.为保证平面四杆机构良好的传力性能,( B)不应小于最小许用值。
A.压力角 B.传动角 C.极位夹角 D.啮合角
7.力F使物体绕点O转动的效果,取决于(C )。
A.力F的大小和力F使物体绕O点转动的方向 B.力臂d的长短和力F使物体绕O点转动的方向 C.力与力臂乘积F?d的大小和力F使物体绕O点转动的方向 D.力与力臂乘积Fd的大小,与转动方向无关。
8.凸轮机构中的压力角是指( B) 间的夹角。
A.凸轮上接触点的法线与该点的线速度方向 B.凸轮上的接触点的法线与从动件的运动方向 C.凸轮上的接触点的切线与从动件的运动方向
9.平面四杆机构无急回特性时,行程速比系数(C )。
A.大于1 B.小于1 C.等于1
10.机器与机构的区别在于(C )。
A. 是否由各种零件经装配而成的组合体 B.它们各部分之间是否有确定的相对运动 C. 在工作时是否能完成有效的机械功或能量转化
3.机械知识 考试咯
三、选择题 1、随外力解除后而消失的变形称为 。
C A、塑性变形 B、扭转变形 C、弹性变形 2、下面的运动副属于低副的是 。 A A、滑块与导槽 B、齿轮啮合 C、凸轮从动件 3、电影放映机的卷片机构采用的是 。
B A、棘轮机构 B、槽轮机构 C、凸轮机构 4、一端是固定铰支座,另一端是活动铰支座的梁称为 。 B A、外伸梁 B、悬臂梁 C、简支梁 5、能绕机架上转动副中心作整周转动的杆称为 。
B A、摇杆 B、连架杆 C、曲柄 6、按凸轮形状分类有 。 A A、盘形凸轮 B、尖顶从动件 C、平底从动件 7、满足整转副存在的条件时,取最短杆对面的杆为机架是 。
这个是不是问题打错了? A、曲柄摇杆机构 B、曲柄滑块机构 C、双摇杆机构 8、杆件受到外力引起长度伸长的变形是 。 C A、剪切变形 B、扭转变形 C、拉伸 9、三角形螺纹当量摩擦角ρv最大,主要用于 。
B A、传动 B、联接 C、单向受力的构件 10、机器利用机构慢速运动的行程为工作行程,快速运动的行程作为回程,这种特性称为 。 C A、适用性 B、能量转换 C、急回特性 11、是构件抵抗破坏的能力。
B A.刚度 B.强度 C.塑性 12、是构成机械的最小单元,也是制造机械时的最小单元。B A. 机器; B.零件; C.构件; D.机构。
13、下面不属于低副的运动副是 。B A.铰链联接 B.滑块与导槽 C.啮合的齿轮 14、随外力解除而消失的变形称为 。
A A.弹性变形 B.塑性变形 C.残余变形 15、电影放映机的卷片机构是 机构。C A.棘轮 B.凸轮 C.槽轮 16、沿着横截面的内力,称为 。
D A. 扭矩; B.弯矩.; C. 轴力; D. 剪力。 17、汽车的原动机部分是: 。
C A. 滚子 B.滚子轴承 C.汽车内燃机 18、两个构件之间以线或点接触形成的运动副,称为 。B A. 低副; B.高副; C. 移动副; D. 转动副。
19、自行车的中轴属于 轴。 C A. 传动轴; B. 转轴;C. 固定心轴;D. 转动心轴。
20、能够使物体产生运动或有运动趋势的力称为 。A A、约束力 B、主动力 C、反作用力。
4.机械设计基础考什么啊
全书内容分为5篇:
第1篇“机构的组成和机械设计概论”主要讲述平面机构的结构分析、机械设计概论与现代设计法应用概述,是机构和机械设计的共性基础知识;
第2篇“常用机构”主要从传递运动的角度讲述一些常用机构(如连杆机构、凸轮机构、轮系及其他常用机构)的工作原理、应用和运动设计方法;
第3篇“机械传动”主要从传递动力的角度讲述一些常见的机械传动(如带传动、链传动、齿轮传动和蜗杆传动等)的工作原理、标准规范和设计计算方法;
第4篇 “轴系零部件”主要讲述轴系(包括滑动轴承、滚动轴承、轴、联轴器、离合器和制动器等主要零部件)的工作原理、组合设计和选用计算方法;
第5篇“机械联接”介绍常用机械静联接(包括键、销和螺纹联接)和弹性联接(弹簧)的工作原理、标准规范和计算方法。
5.机械设计制造及其自动化
机械设计制造及其自动化
业务培养目标:
本专业培养具备机械设计制造基础知识与应用能力,能在工业主产第一线从 事机械制造领域内的设计制造、科技开发、应用研究、运行管理和经营销售等方面工作的高级工程技术人才。
业务培养要求:
本专业学生主要学习机械设计与制造的基础理论,学习微电子技术、计算机技术和信息处理技术的基本知识,受到现代机械工程师的基本训练,具有进行机械产品设计、制造及设备控制、生产组织管理的基本能力。
毕业生应获得以下几方面的知识和能力:
1. 具有较扎实的自然科学基础、较好的人文、艺术和社会科学基础及正确运用本国语言、文字的表达能力;
2. 较系统地掌握本专业领域宽广的技术理论基础知识,主要包括力学、机械学、电工与电子技术、机械工程材料、机械设计工程学、机械制造基础、自动化基础、市场经济及企业管理等基础知识。
3. 具有本专业必需的制图、计算、实验、测试、文献检索和基本工艺操作等基本技能;
4. 具有本专业领域内某个专业方向所必要的专业知识,了解其科学前沿发展趋势;5. 具有初步的科学研究、科技开发及组织管理能力;
6. 具有较强的自学能力和创新意识。
主干学科:力学、机械工程。
主要课程:工程力学、机械设计基础、电工与电子技术、微型计算机原理应用、机械工程材料、制造技术基础。
主要实践性教学环节:包括军训,金工、电工、电子实习,认识实习,生产实习,社会实践,课程设计,毕业设计(论文)等,一般应安排40周以上。
主要专业实验:现代制造技术综合实验、测试与信息处理实验。
修业年限:四年。
授予学位:工学学士。
相近专业:材料成型及控制工程。
6.注册机械工程师基础
技术理论基础知识,主要包括力学、机械工程材料、机械设计、机械制造基础、机械制造工艺、电工与电子技术、自动化基础、测试技术、企业管理、数控技术编程、模具设计制造、汽车检测维修、机械工程项目管理和机械设备安装管理等基础知识。
具有本专业必需的制图、计算、实验、测试、文献检索和基本工艺操作等基本技能。
具有熟练运用计算机等现代高科技技术服务专业的能力。
具有本专业机械电子工程方向所必要的专业知识、了解其学科前沿和发展方。
具有较强的自学能力、创新意识和较高的综合素质。
具有良好的外语应用能力和沟通表达能力。
具有独立的科学研究、科技开发及组织管理能力。
这个证书太牛了,估计很难取得